

3.3VDC供电
实时角速率输出
前进轴体加速度
TTL输出
全固态
寿命长,稳定性强
紧凑而轻巧设计
重量轻

 产品介绍
产品介绍
 应用范围
应用范围
 性能参数
性能参数
 尺寸图
尺寸图
 资料下载
资料下载
IMU761Y是一款基于MEMS技术的惯性测量模块,兼具IMU/VRU/AHRS功能。模块采用自主研发的自适应扩展卡尔曼滤波算法,并结合IMU噪声动态分析与载体运动状态识别算法,能够在高动态环境下保持高精度姿态角输出,同时有效抑制航向角漂移。
出厂前,每个传感器均经过精细补偿,包括温度、零偏、比例因子与交叉轴误差校准。
模块支持UART与CAN接口通信,具备丰富的用户可配置选项。如需使用CAN接口,用户需自行集成CAN收发器电路。该产品为全自主研发的惯性测量单元,适用于对可靠性与环境适应性要求严苛的工业应用场景。



| IMU761Y | 测试条件/备注 | 指标 | |
| 横滚精度 | 1 σ rms | 0.15° | |
| 横滚量程 | - | ±180° | |
| 俯仰精度 | 1 σ rms | 0.15° | |
| 俯仰量程 | - | ±90° | |
| 无参考航向角精度 | 1 σ rms | 0.2° | |
| 无参考航向角量程 | - | ±180° | |
| 角度分辨率 | - | 0.001° | |
| 陀螺仪 | 量程 | - | ±2000°/s |
| 非线性度 | @25℃,ALLAN 方差,1 σ | ±0.05%FS | |
| 噪声密度 |
| 0.015°/s/√H | |
| 零偏不稳定性 | 艾伦方差1 σ | 5°/h | |
| 带宽 |
| 50Hz | |
| 零点偏移 | 1 σ rms | ±0.5°/s | |
| 零点温漂 | 1 σ rms(-40~85℃) | ±1°/s | |
| 量程 | - | ±12g | |
| 非线性度 | @25,ALLAN 方差,1 σ | ±0.5%FS | |
| 噪声密度 |
| 190ug/√Hz | |
| 零偏不稳定性 | 艾伦方差1 σ | 0.05mg | |
| 带宽 |
| 50Hz | |
| 零点偏移 | 1 σ rms | ±20mg | |
| 零点温漂 | 1 σ rms(-40~85℃) | ±20mg | |
| 供电电压 | | 3.3VDC | |
| 工作电流 | | 70mW | |
| 输出频率 | | 200Hz | |
| 抗冲击性 | | 2000g | |
| 工作温度 |
| -40~85℃ | |
| 存储温度 | 相对湿度≤ 65% | -40~85℃ | |
| 尺寸 | L14.3×W11.8×H3.2mm | ||
| 重量 | <10g(不含配线) | ||
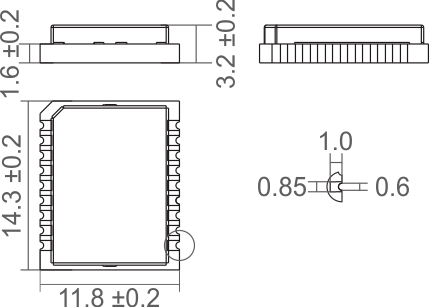
L14.3×W11.8×H3.2mm
* 瑞芬产品规格书请联系在线销售工程师获取,或致电0755-29657137获取。







 点击咨询
点击咨询 0755-29657137
0755-29657137
